基于Simulink的无刷直流电机转速控制:PI与自抗扰控制对比分析
引言
在工业自动化、电动汽车及精密驱动系统中,无刷直流电机(BLDC)因其高效率、低噪声和长寿命被广泛应用。为实现高性能调速,常采用双闭环控制结构——内环为电流环,外环为转速环。本文利用Simulink搭建仿真模型,分别在转速环中使用传统PI控制器与ADRC(自抗扰控制器),通过动态响应与抗干扰能力对比,验证ADRC在复杂工况下的优势。系统架构设计
控制系统采用典型的双闭环结构:- 电流内环: 实现对相电流的快速跟踪,抑制瞬态波动,采用经典PI控制。
- 转速外环: 调节电机转速以跟踪设定值,分别测试PI与ADRC两种策略。
PI控制器原理与实现
比例-积分(PI)控制结构简单、参数调节直观,广泛用于工程实践。其输出由误差的比例项和积分项组成:u(t) = Kp * e(t) + Ki * ∫e(τ)dτe(t) 为转速偏差,Kp 和 Ki 分别为比例与积分增益。在离散系统中,积分部分通常采用累加近似:
integral = integral + Ki * error * Ts;
output = Kp * error + integral;ADRC自抗扰控制机制
ADRC通过引入"扩张状态观测器"(ESO),将系统内部非线性、外部扰动以及建模误差统一视为"总扰动",并实时估计补偿,从而显著增强系统鲁棒性。 ADRC主要由三部分构成:- 跟踪微分器(TD): 安排过渡过程,减少设定值跳变引起的超调。
- 扩张状态观测器(ESO): 观测系统状态及总扰动,提供前馈补偿。
- 非线性反馈律: 结合误差与扰动估计值生成控制量。
Simulink建模流程
在MATLAB/Simulink环境中构建完整控制模型,主要包括以下模块:1. 电机本体模型
基于BLDC的机电方程建立状态空间模型:di/dt = (u - R*i - Ke*ω) / L
dω/dt = (Ke*i - B*ω - Tl) / J-
i:电枢电流-
u:端电压-
R, L:定子电阻与电感-
Ke:反电动势系数-
ω:角速度-
J, B:转动惯量与阻尼系数-
Tl:负载转矩
使用S-Function或连续模块组实现上述微分方程。
2. 电流环PI控制器
接收参考电流与实际电流之差,输出电压指令。PI参数通过试凑法或Ziegler-Nichols方法整定,确保电流响应快速且无静差。3. 转速环切换结构
设计两个并行支路:- 一支采用标准PI控制器;
- 另一支采用ADRC控制器。
4. 扰动注入模块
在某一时刻施加阶跃负载(如TL=0.5N·m),模拟真实工况变化,评估控制器抗扰恢复能力。仿真结果对比
运行仿真后,获取两种控制策略下的转速响应曲线。PI控制表现
在无扰动情况下,PI控制器能够使转速平稳达到设定值,稳态精度较高。但在负载突加瞬间,出现明显跌落,恢复时间较长(约0.8秒),且伴随小幅振荡,体现出较弱的动态抗扰能力。ADRC控制表现
当相同扰动发生时,ADRC凭借ESO对扰动的实时估计,在毫秒级内完成补偿,转速波动极小(下降不足5%),并在0.2秒内完全恢复。设定值跟踪更加平滑,几乎无超调。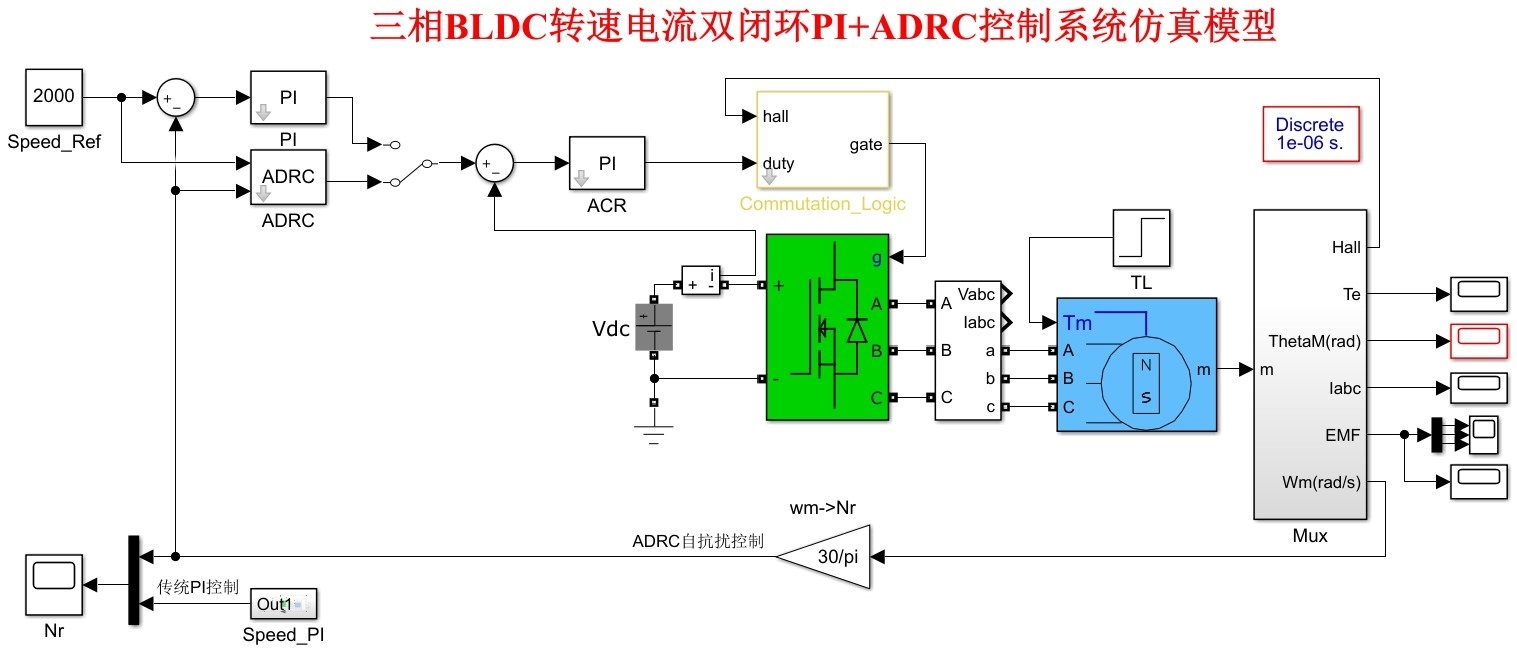
结论
通过Simulink平台对无刷直流电机进行转速控制仿真,结果表明:- PI控制结构简单,适合稳态运行环境,但在动态扰动工况下性能受限。
- ADRC无需精确模型即可有效抑制内外部扰动,具有更强的鲁棒性和更快的恢复速度。
