三电平逆变器SVPWM与PI控制的PMSM负载Matlab Simulink仿真
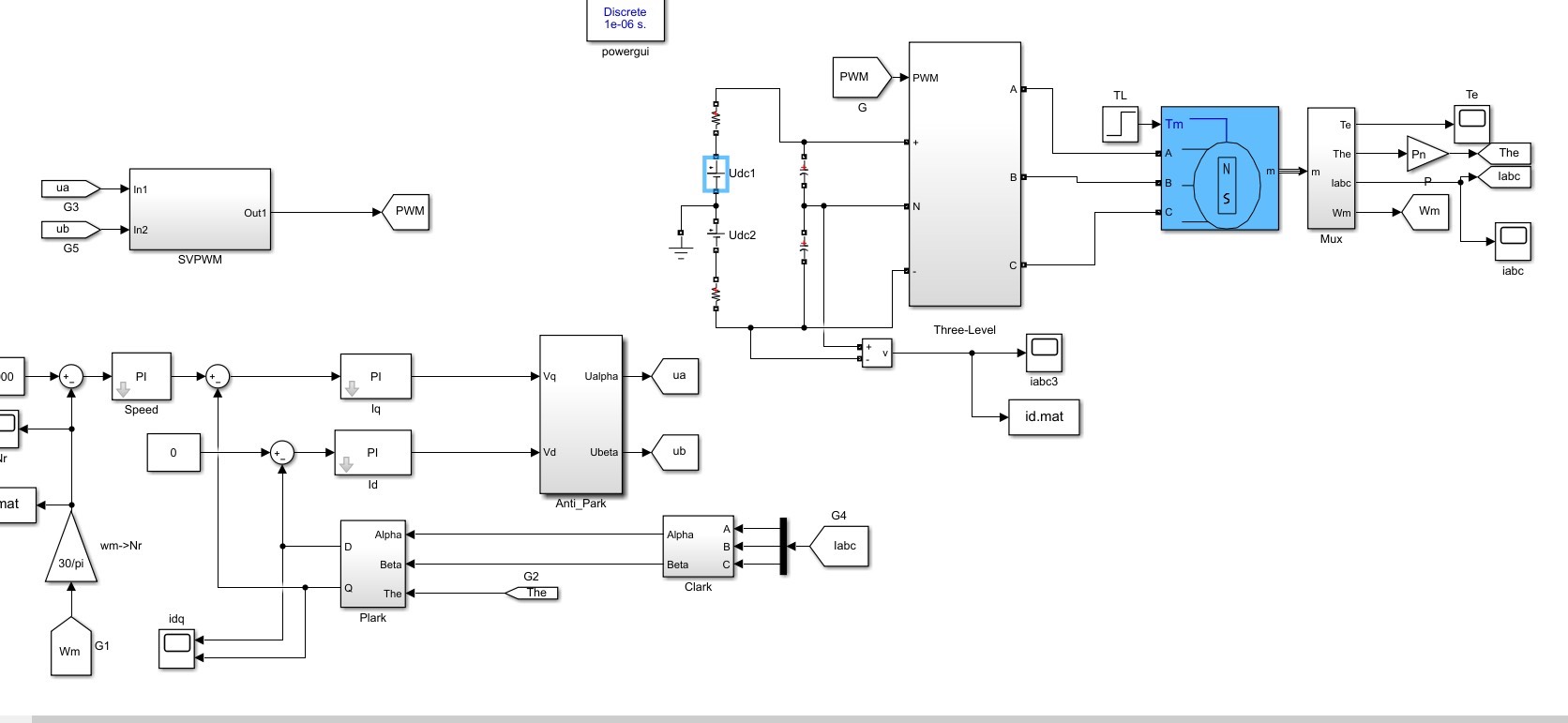
在研究三电平逆变器驱动永磁同步电机(PMSM)的Simulink仿真时,可以将复杂系统拆分为两个核心模块:空间矢量脉宽调制(SVPWM)和比例积分(PI)双闭环控制。以下将详细介绍如何构建实用模型,并分享调试过程中可能遇到的问题。
1. 三电平NPC逆变器建模
在Simulink中,可以直接使用内置的"Three-Level NPC Converter"模块来实现三电平逆变器建模。直流侧电容参数设置至关重要,例如可以选择split_capacitor=4700e-6,母线电压设为约600V。为了确保中点电位平衡,可以通过调整载波叠加一个电压偏移补偿:
% 中点电位补偿算法
if abs(Vdc1 - Vdc2) > 5 % 当电位差超过5V时触发补偿
carrier_offset = (Vdc1 - Vdc2) / (Vdc1 + Vdc2);
else
carrier_offset = 0;
end
此补偿值直接叠加到调制波上,实测可将中点电压波动控制在2%以内。
2. SVPWM算法实现
建议通过Matlab Function模块自定义SVPWM算法。关键在于60度坐标系下的扇区判断,可以采用查表法加速计算:
sector_map = [1, 2, 6, 4, 3, 5]; % 预定义扇区映射表
theta = mod(angle_elec, 2*pi);
sector = sector_map(floor(theta / (pi/3)) + 1);
计算矢量作用时间时需注意饱和处理,特别是在过调制区域应加入限幅逻辑:
Ts = 1e-4; % 开关周期
t1 = Ts * (sqrt(3)*Ubeta - Ualpha) / Vdc;
t2 = Ts * 2*Ualpha / Vdc;
% 时间限幅
t1 = max(min(t1, Ts), 0);
t2 = max(min(t2, Ts - t1), 0);
t0 = Ts - t1 - t2;
3. PI控制器参数调试
转速环PI参数调试的一个经验是让电流环带宽至少是转速环的5倍以上。可以从初始值Kp=0.5、Ki=10开始尝试,观察启动阶段的超调量。若出现严重过冲,可引入转速微分反馈:
speed_error = speed_ref - speed_actual;
integral = integral + Ki * speed_error * Ts;
output = Kp * speed_error + integral - Kd * acceleration;
对于电流环,采样周期建议≤50μs。在使用离散PID模块时,记得启用anti-windup功能。此外,可以在dq轴电流环之间添加解耦项以提升动态响应:
Vd = Kp * (Id_ref - Id_actual) + Ki * integral_d - w * Lq * Iq_actual;
Vq = Kp * (Iq_ref - Iq_actual) + Ki * integral_q + w * (Ld * Id_actual + PM_flux);
4. PMSM参数配置注意事项
定子电阻的实际值会因运行温度升高而增加20%-50%,因此不应直接照搬手册值。可以在参数页面勾选"Consider temperature effects"选项。测试负载转矩突变时,务必在Mechanical Load模块中启用Cogging Torque选项,否则可能导致仿真结果过于理想化。
5. 提高仿真效率与波形分析
完成所有模块搭建后,可通过按F8启动并行仿真,从而提速3倍。如果遇到代数环错误,可以在PI控制器输出端添加一个1e-6秒的小延迟模块解决。波形分析时重点关注转速上升时间(建议控制在0.2s内)和转矩脉动(小于3%为佳)。若电流总谐波失真(THD)超过5%,则需要重新检查调制算法。