Matlab 2021环境下的先进电机控制架构:线性自抗扰与磁链估计算法融合方案
在现代电机驱动系统中,控制精度与动态响应能力是衡量性能的核心指标。本文介绍一种基于Matlab 2021b平台构建的高性能控制架构,集成了线性自抗扰控制器(LADRC)与改进型磁链状态观测器,具备良好的宽速域适应性,并支持从模型到嵌入式代码的一键生成流程。
宽速域磁链估计技术实现
磁链观测器作为无传感器控制策略的关键模块,其任务是在不依赖物理传感器的前提下,精确重构电机内部磁链状态。该设计采用电压模型结合反馈校正机制,在低速段通过引入积分初值补偿与零漂抑制策略,有效缓解纯积分带来的累积误差;在高速运行时则利用闭环结构增强系统鲁棒性,实现平滑过渡。
以下为简化版离散化仿真逻辑,用于演示d-q轴磁链演化过程:
% 参数定义
Rs = 1.0; % 定子电阻 (Ω)
Ld = 0.1; % d轴电感 (H)
Lq = 0.1; % q轴电感 (H)
wr = 15; % 电角速度 (rad/s)
Ts = 1e-3; % 采样周期
% 时间序列初始化
t = 0:Ts:1;
psi_d = zeros(size(t));
psi_q = zeros(size(t));
% 迭代计算磁链轨迹
for idx = 2:length(t)
delta_t = Ts;
psi_d(idx) = psi_d(idx-1) + delta_t * ( -Rs/Ld * psi_d(idx-1) + wr * Lq/Ld * psi_q(idx-1) );
psi_q(idx) = psi_q(idx-1) + delta_t * ( -Rs/Lq * psi_q(idx-1) - wr * Ld/Lq * psi_d(idx-1) );
end
实际工程实现中,通常会加入非线性补偿项、温度系数修正以及数字滤波环节,以提升观测精度和抗干扰能力。
LADRC控制器设计及其优势
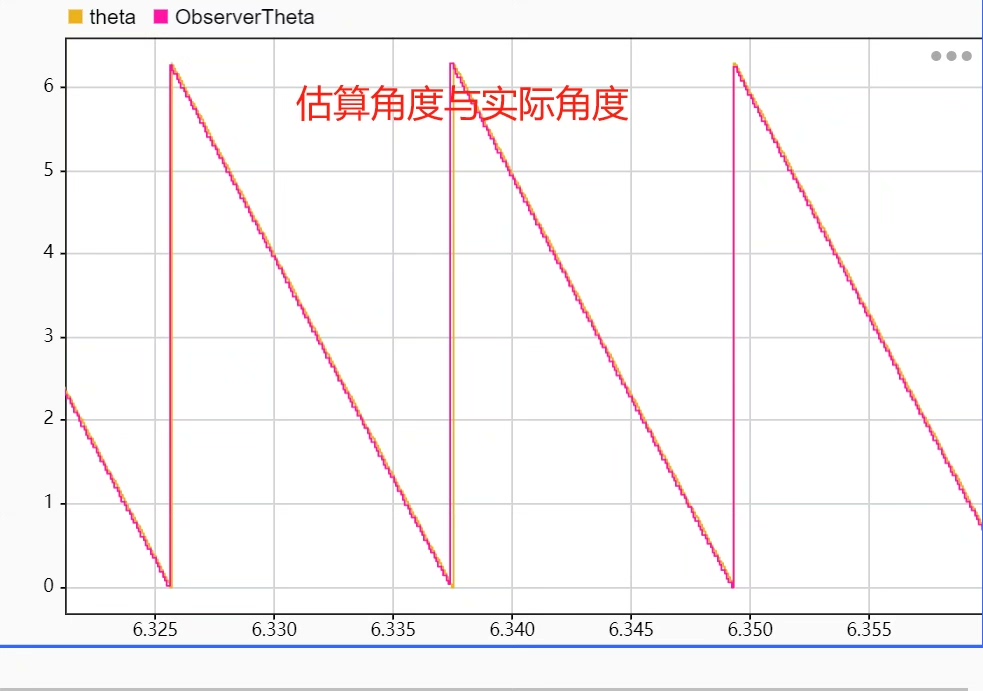
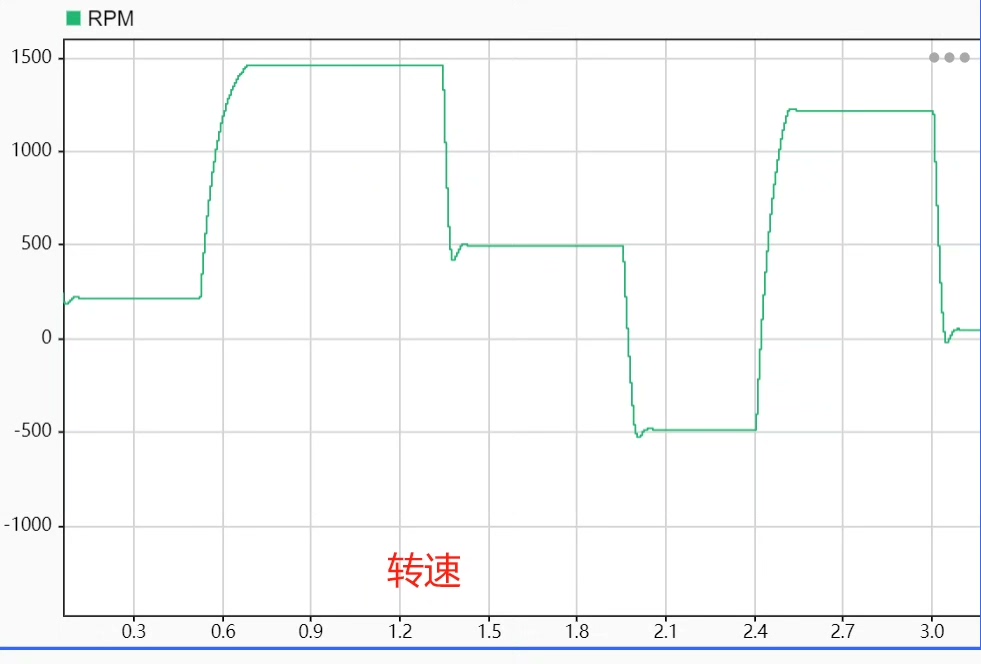
传统PI控制器受限于固定增益结构,在面对负载突变或参数摄动时难以兼顾稳定性与快速性。本方案采用三阶线性扩张状态观测器(LESO)构成LADRC框架,将系统内外扰动统一视为"总扰动"进行实时估计并前馈抵消。
核心算法循环如下:
% 控制器参数配置
b = 1.0; % 已知系统增益
k_p = 50; % 比例增益
beta = [80, 600, 8000]; % 观测器极点配置
z = [0; 0; 0]; % 扩张状态向量 [输出估计, 状态估计, 扰动估计]
T_sample = 1e-3;
for n = 1:length(t)
y_measured = read_actual_output(); % 获取实测输出
e = setpoint - y_measured; % 偏差计算
% 扩张状态观测器更新
z(1) = z(1) + T_sample * (z(2) - beta(1)*e);
z(2) = z(2) + T_sample * (z(3) - beta(2)*e + b*u_control);
z(3) = z(3) - T_sample * beta(3)*e;
% 控制律生成
u_control = (k_p * e + z(3)) / b;
apply_control(u_control); % 施加至被控对象
end
该结构显著提升了系统对未建模动态、外部负载扰动及参数偏差的抑制能力,尤其适用于工况复杂、要求高稳态精度的应用场景。
模型驱动开发与自动代码生成
整个控制系统在Simulink环境中完成建模,利用Stateflow实现模式切换逻辑,通过Embedded Coder可直接导出符合AUTOSAR标准的C代码,部署于TI C2000、Infineon TriCore等主流MCU平台。此工作流大幅缩短了研发周期,提高了软件可靠性。
综合来看,该集成方案充分发挥了现代控制理论的优势,结合成熟工具链,为高性能电机控制系统提供了可复用、易移植的技术路径。
